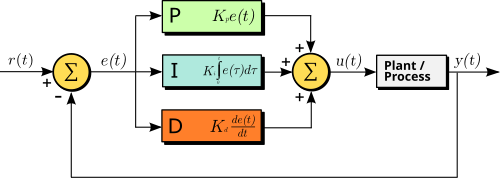
PID control is a common technique used in robotics to control the movement of a robot. It stands for Proportional, Integral, and Derivative control. The basic idea is to use feedback from sensors to adjust the output of the robot's motors in order to achieve a desired behavior.
The proportional term is based on the current error, which is the difference between the desired value and the actual value. The integral term is based on the accumulated error over time, which helps to eliminate steady-state error. The derivative term is based on the rate of change of the error, which helps to reduce overshoot and improve stability.
To implement PID control, you need to tune the three parameters (proportional gain, integral gain, and derivative gain) to achieve the desired performance. This can be done through trial and error, or by using more systematic methods such as the Ziegler-Nichols method.
To implement PID control in code, you can use the following formula:
output = (proportional gain * error) + (integral gain * accumulated error) + (derivative gain * rate of change of error)